Cross grid encoders, such as KGM series by Heidenhain, has the following inherent issues:
- The distance between sensor and grid plate must be smaller than 1 mm, which requires very careful setup by an experienced operator.
- The orientation of sensor to grid plate must be carefully aligned, and fixed during the measurement.
- Calibration of its measurement accuracy is extremely difficult.
This project studies the application of vision-based recognition to the measurement of two-dimensional positioning errors of a machine tool. Its potential advantages are:
- Camera can be apart from the artefact by several ten millimeters; it is much safer.
- Measurement is possible even when the artefact rotates to camera. For example, it can be applied to a rotary axis.
- Accuracy calibration of artefact is relatively easy.
- Lower-cost than cross grid encoders.
>> Publications:
JE21,
CE43,
CJ52,
CJ44,
CJ43
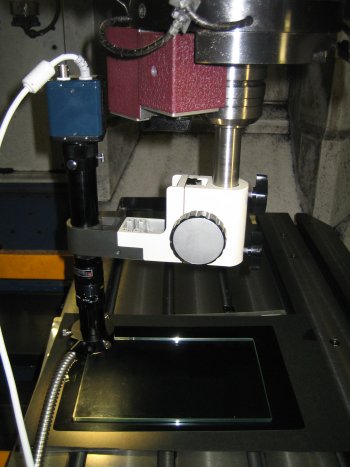
Figure 1: Experimental configuration. A camera, a lens, and a light are attached to a spindle of a vertical machining center. In this test, the machine's positioning errors in the XY plane is measured by using a glass grid plate as an artefact.
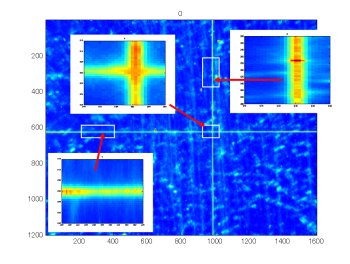
Figure 2: An example of image. Straightness errors, squareness errors, and positioning errors of the machine are evaluated by the recognized location of a grid point on the image.
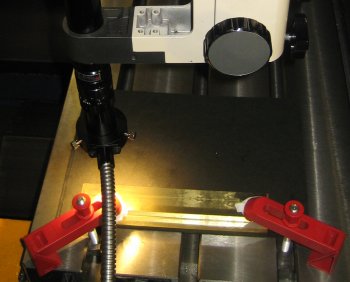
Figure 3: A test to measure straightness error by using an optical flat as an artefact.
|
