|
|
|||||
| |||||
|
「オープンループ」レーザトラッカ(2次元)で,自動追尾機構を持つレーザトラッカを用いなくても,数値制御された旋回軸と,レーザ干渉計だけを用いて,同じ測定を行う方法を提案しました.ここでは,その基本的なアイデアを3次元に拡張するため,旋回2軸に,レーザ干渉計を取り付け,3次元計測を行う「オープンループ」レーザトラッカの試作機を製作しました. 大型の加工機で測定実験を行い,約1メートル立方の範囲内で,工作機械の「誤差マップ」が測定しました.自動追尾機構がなくても,同等の測定精度が達成できることを示しました.(2014年3月) >> 関連論文: JE31, CE56, CJ72, CE51 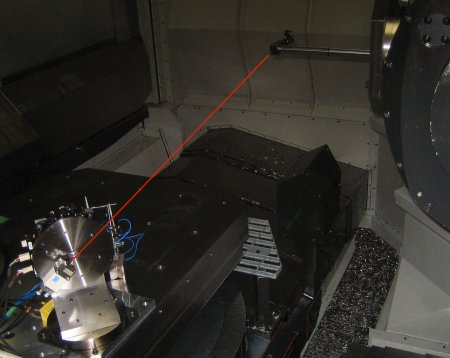 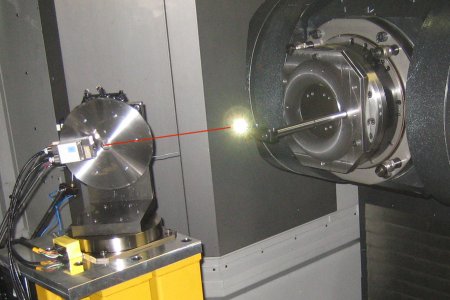
図1: 「オープンループ」レーザトラッカの試作機を使った実験の様子.大型の5軸加工機の3次元空間精度を測定しています.主軸に取り付けたキャッツ・アイ反射鏡の方向に,レーザ光が向くように制御します. 
図2: 「オープンループ」レーザトラッカの試作機による測定結果の例.指令位置(黒丸)に対する,実際の工具端の位置(赤丸)を,誤差を拡大して表示しています.立方体状の指令軌跡に沿って機械を動かしたとき,実際の機械がどのように動いているかが,3次元空間内の軌跡として観察できます. | |||||