|
|
||
|
||
|
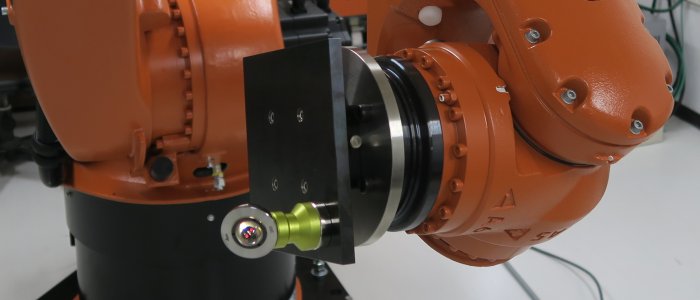
6自由度ロボットの新しい幾何学モデル ロボットの空間精度を可動領域全体で保証することができれば,ロボットの新しい用途を拓くことができると考えています.ここで,「空間精度」とは,指令位置に対する.ロボットの手先の「絶対的な」3次元位置の精度を,可動領域全体で評価したものを呼びます.SCARAロボットで固めた基本的な考え方を.6自由度ロボットに応用する研究を進めています. 工作機械には,X・Y・Z軸各軸の,直進位置決め誤差・真直度・姿勢度誤差などの誤差を,指令位置の関数として「誤差マップ化」し,それらの組み合わせとして表られる工具端の3次元位置誤差を補正する,「空間誤差補正」と呼ばれる機能が実用化さえています.この考え方を,ロボットにも適用できないか,というのが基本的なアイデアです.
6つの旋回軸をそれぞれ,一定角度毎に割り出したとき,手先の3次元位置をレーザトラッカで測定します.それを使って,指令角度ごとに,角度位置決め偏差を同定します.また,ロボットの旋回軸はバックラッシュの影響が大きいため,回転方向によって誤差が異なるようにモデル化しました.このように,精緻な幾何学モデルを作ることで,ロボットの3次元位置決め誤差を可動領域全体で正確に予測し,補正を行う研究を進めています. >> Publications: JE18, JE8, JE7, CJ31, CE12, CE9, CJ12 |
||
|
|
||
