|
|
||

|
||
|
「オープンループ」トラッカの考え方を使ったスカラ型ロボットの空間精度測定 先進国だけでなく,中国などの新興の工業国でも,近年人件費が上昇していることなどを背景として,産業用ロボットの市場は世界的に急拡大しています. 現在のロボットは,ほぼすべて,「ティーチング」でプログラムされています.「ティーチング」とは,人間がロボットを手動制御で所定の運動を実際にさせ,それをロボットに記憶させることです.一方で,工作機械は,「ティーチング」でプログラムされることはありえません.工作機械の運動経路は,コンピュータ上のモデルから,自動計算されます. ロボットでこれができない一つの理由は,ロボットには十分な「空間精度」がなく,指令した通りに動作する保証がないためです.ここで,「空間精度」とは,指令位置に対する.ロボットの手先の「絶対的な」3次元位置の精度を,可動領域全体で評価したものを呼びます. ロボットが,CNC工作機械のようにプログラムで経路を指令でき,かつ,ロボットの空間精度があるレベル以上であると保証することができれば,ロボットの新しい用途を拓くことができると考えています. 本研究では,図1に示す測定法を提案しました.ロボットの手先に取り付けたレーザ干渉計のレーザ光が,反射鏡に常に向くように,ロボットの姿勢を制御します.「レーザトラッカ」という測定器と同じように,ロボットの手先を追従しながら,ロボットの手先までの距離を測定できますが,自動追尾ではなく,手先の指令位置をオープンループ制御的に追従することから,「オープンループ・レーザトラッカ」と呼んでいます. この測定法を用いることで,XY平面上の多数の位置でロボットの手先と反射鏡との間の距離を測定し続けることができます.そこから,ロボットの各関節の回転角度の「誤差マップ」を同定するアルゴリズムを構築しました.(臼井 亮太,茨木,2018年11月) >> Publications: JE13, CJ6, CJ2 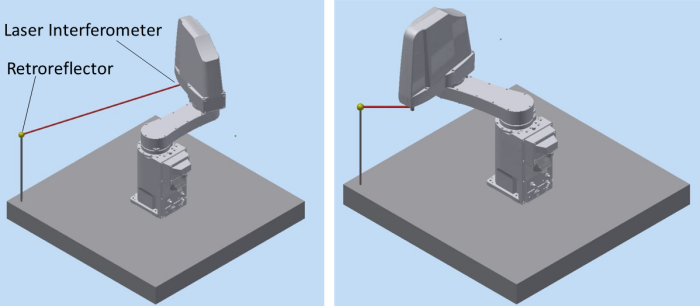 図1: 「オープンループ」トラッカの考え方を使った測定法  図2: 測定のセットアップ |
||